VisionBot is a collection of several utilities for obstacle detection algorithm path-finding. The project contains the following modules:
- Optical flow calculator: Calculate the optical flow to a given video or a video stream and plot the flow vectors on the top of the video.
- MagicMotion: A video clip generator for optical flow verification. The module applies translation, rotation or stretching to a static image.
- IQIF motion detector: preliminary results to the obstacle avoidance algorithm.
Tech Stack
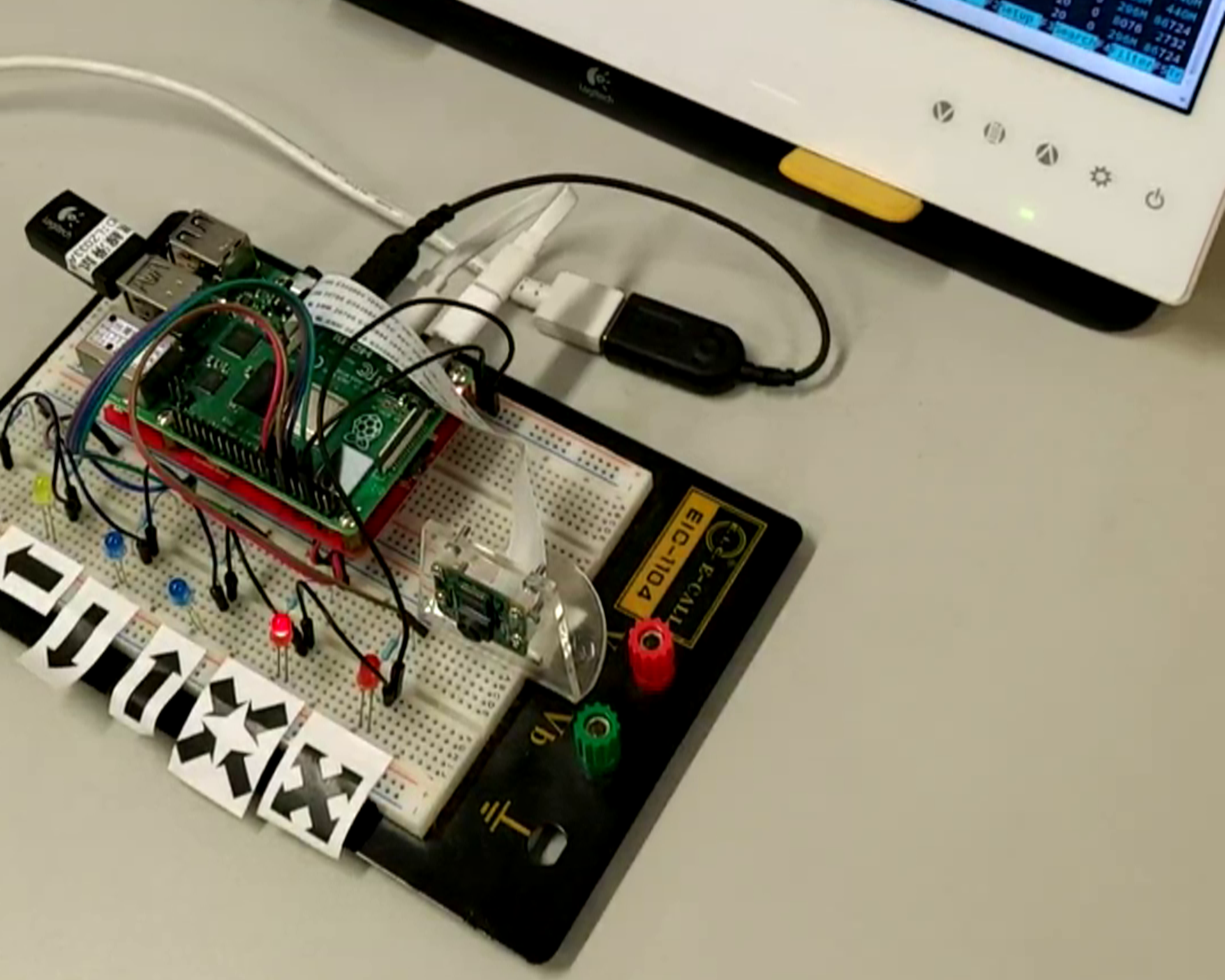
- Development: The motion detector demo is implemented on a Raspberry Pi.
- Programming languages: The major part of the application is written in Python and Qt, and the IQIF neural simulator is written in C++ in consideration of efficiency.
- Algorithms: Most of the image processing algorithms are called from the OpenCV library with Python binding.
Results
Motion detector real-time demo.
Acknowledgements
- Thanks to my teammate Cheng-Fu Yeh‘s algorithmic insights to the obstacle avoidance module and he is also the author of the IQIF (Integer Quadratic Integrate-and-Fire) neural simulator.
- Thanks to the team leader Cheng-Te Wang for his precious suggestions for the project.