
In order to evaluate obstacle avoidance algorithms for drones, DroneView is a toolkit for recording benchmarking data on an in-house design drone. DoneView collects the following data:
- Video captured by a downward-facing camera
- Timestamps
- 3-dimentional positions in local coordinates
There is also a visualization module in the project that makes those data easy to perceive (shown in the Results section).
Tech Stack
- Programming languages: The program is written in Python on a Raspberry Pi, and a shell script invokes the recording program on start-up.
- Drone technology: The drone was assembled in-house using open-source flight control software PX4.
- 3D printing: The Raspberry Pi board and camera were attached to the drone in a 3D printed payload box.
Results
In-house built drone

Recorded video
A selected flight video.
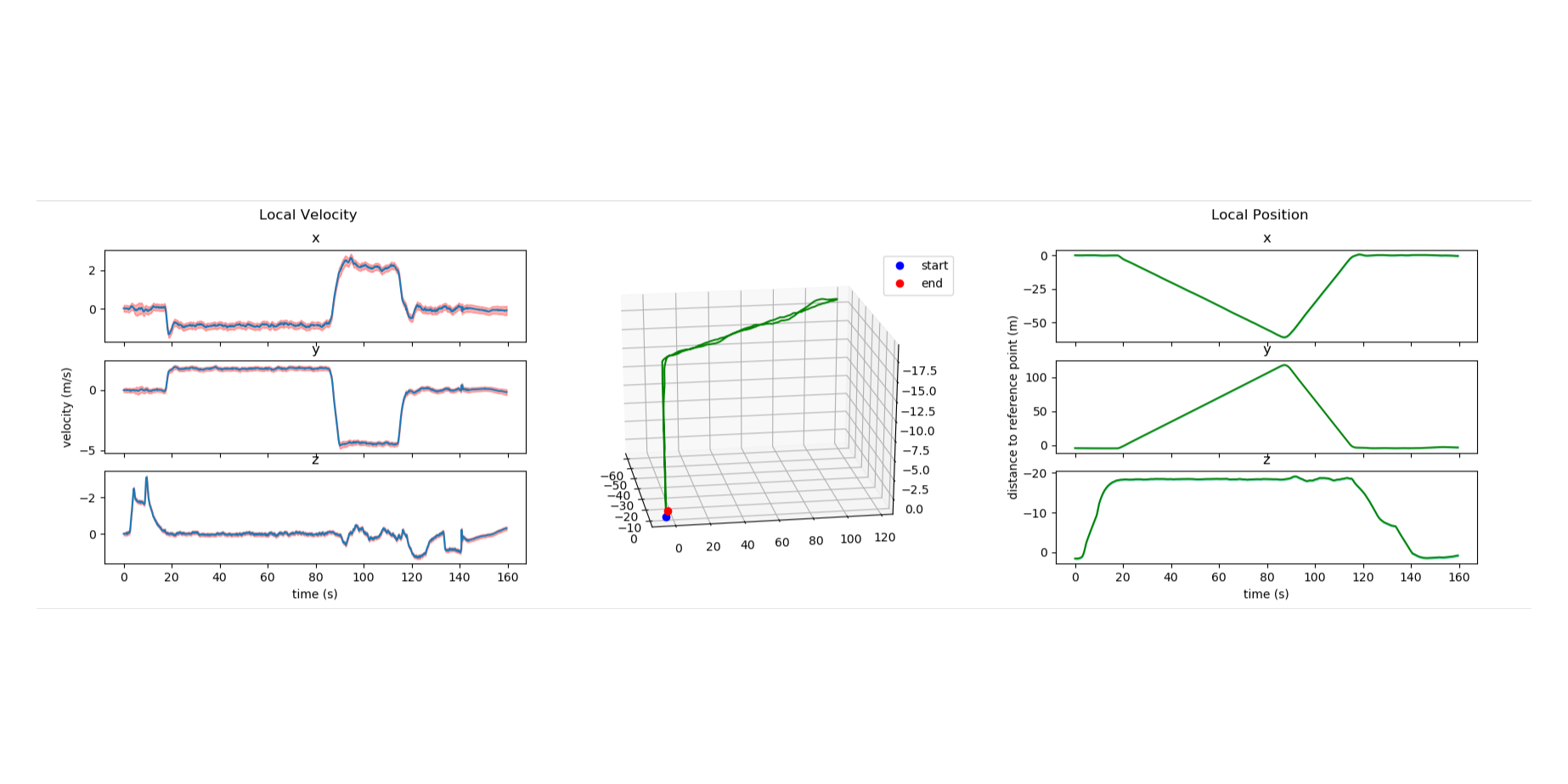
Position records
The recorded flight data from the same mission as the video above.
Acknowledgements
- This project was funded by CCLo Lab.